While autonomous driving is gaining momentum, the process of developing this technology is unlike any automotive industry has ever faced before.
Based on one study by Rand Corp, to be able to reach a human-level error rate, self-driving vehicles will have to drive 11 billion miles. This would take hundreds of years of physical testing. They require systems that should not only work correctly but also cope with numerous scenarios world roads can present. The process and the technology are heavily supported by a large pool of data coming from production vehicles and prototypes. How can all this data be leveraged to unlock the transformative power and ensure the full safety of autonomous driving?
Simulation holds promise for the future of autonomous vehicle development.
Why simulation is the cornerstone of autonomous vehicle development
Luca Castignani, Global Automotive strategist, explains in the article published by Automotive World: “When we teach a human to drive, we just need to teach basic vehicle functions. We do not need to tell any learner how to distinguish between blue or black ink on a road sign, or that a slightly rusty or sun-bleached sign is conveying the same information as a freshly printed one. When you’re developing autonomous systems, you’re dealing with technology that doesn’t initially know anything.”
When developing autonomous vehicles, whole new engineering fields need to be developed, including AI. On top of this, the development of automotive vehicles is heavily customer-oriented, which requires product differentiation, and yet development resources are limited. Safety and reliability are a major concern. A software bug, inaccurate sensor or malfunctioning actuator can all cause expensive failures which is why software, hardware, and the electronics in these machines need to be heavily tested through simulation.
Worldwide, developers are turning to simulation as a means to accelerate the development of secure autonomous vehicles. Although virtual scenarios come with constraints, they stand out as one of the most effective methods for training self-driving algorithms to prioritize safety in actual traffic conditions. For instance, a recent Verge article reported that Waymo, an ofshoot of Google went as far as to build a Simulation city where it tests its autonomous vehicles in preparation for real-world experiences.
How simulations work
To kickstart the simulation process, engineers must first construct a comprehensive virtual environment. This involves integrating specific real-world driving scenarios and incorporating characters and artifacts. Using these components, cutting-edge autonomous driving simulators can rapidly generate diverse scenarios. The critical factor here is the simulation environment. Robust simulation environments allow engineering teams to manage data generation. This enables the training of an autonomous vehicle system to be well-prepared for a wide range of scenarios, including unforeseen situations and edge cases.
Engineering simulation accelerates autonomous vehicles software development in six areas:
- Sensor performance simulation
- Mission scenario system simulation
- Electronics hardware simulation
- Functional safety analysis
- Semiconductor simulation
- Software and algorithm modelling and development
Testing types
Ensuring the safety of autonomous driving systems in critical scenarios is a complex challenge. To address this, organizations need to explore innovative ideas and testing methods. Accelerating the development process requires the integration of current techniques and the implementation of a robust set of testing methodologies that are reliable, fast, safe, and cost-effective. Here are a few essential testing types in navigating various phases of autonomous driving development:
Software-in-the-loop (SIL): In Software-in-the-Loop (SIL) testing, the software for autonomous vehicles is executed in a simulated setting to evaluate the effectiveness of algorithms and decision-making processes employed by the vehicle.
Hardware-in-the-Loop (HIL): During Hardware-in-the-Loop (HIL) testing, the hardware components of autonomous vehicles, including sensors and controllers, undergo assessment within a simulated environment. This approach allows for early validation without the need to deploy the entire vehicle.
Vehicle-in-the-Loop (VIL): The Vehicle-in-the-Loop (VIL) method involves simulating traffic and environments using actual automobiles, establishing a connection between simulation and practical testing.
Real-World Testing: Following the successful execution of Autonomous Vehicle Simulation and Testing in secure environments, real-world testing is conducted on closed tracks and open highways to verify system performance.
Unleashing the benefits of autonomous vehicle simulations
Simulation has become a critical success factor that every OEM, automaker, and tech provider should consider to winning on the autonomous vehicle passenger market. Here are 6 key reasons why companies should leverage simulation in autonomous vehicle development.
Experiencing the situations in real-world scenarios
Did you know: While scenario-based testing offers advantages for autonomous vehicles, the biggest challenge lies in identifying relevant scenarios, particularly those that defy safety requirements. There are still open questions regarding developing criteria for effective test scenarios, systematic generation methods, and pinpointing critical scenarios for testing.
Solution: Engineers can test self-driving cars in simulated environments in multiple situations with numerous variables.
As mentioned above, experiencing the situations in the real world is rare and costs a lot of money. On the other hand, simulations allow testing in different conditions, all kinds of weather and road conditions and scenarios, and locations that are difficult to replicate in real life even with the partial or full failure of self-driving sensors. For instance, night lights, thick fog, or sun glare can all affect the functioning of critical components in autonomous cars including cameras, LiDARs, and radars. These attributes are relatively easily modeled in a simulated environment. Through simulations, developers can repeatedly test extreme scenarios to achieve consistent responses from the system, a phenomenon commonly referred to as “deterministic running.”
Tackling high development costs
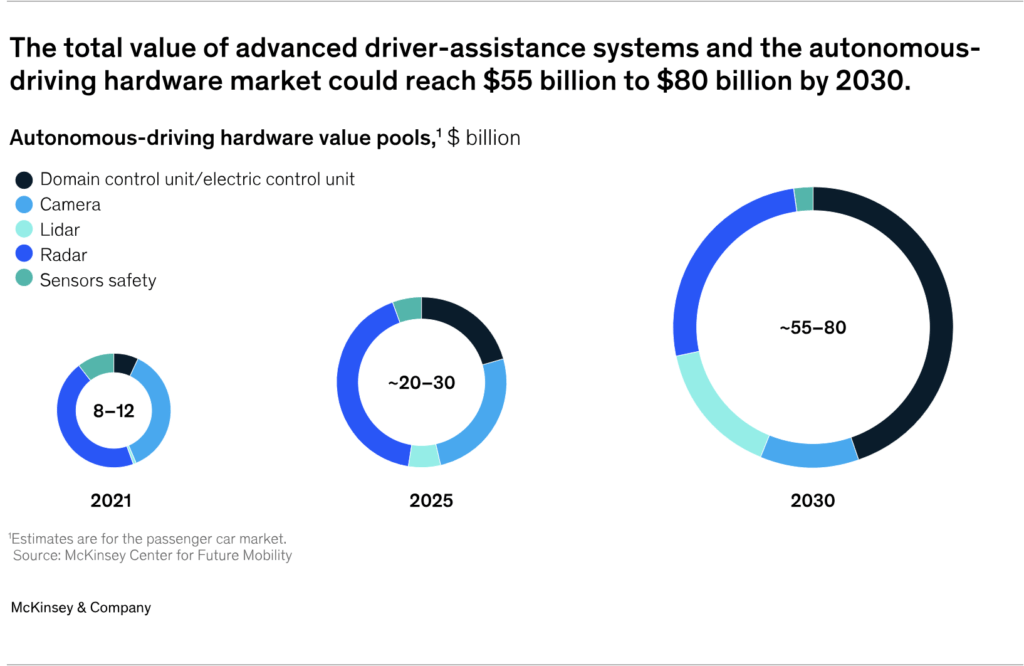
Did you know: According to McKinsey, the costs associated with hardware and software licensing per vehicle for L3 and L4 systems could potentially surpass $5,000 during the initial rollout phase, and the development and validation expenses are expected to exceed $1 billion.
Solution: Simulation can reduce the cost and time of physical testing, as well as the risks associated with real-world scenarios.
Physical testing of autonomous vehicles can be an expensive and time-consuming process as it requires a significant investment in equipment, personnel, and infrastructure. Through simulation platforms developers can conduct virtual experiments, iterate more quickly, test different scenarios, and identify and address issues at an earlier stage.
This accelerates the development cycle, reduces costs, and allows for faster deployment of safer and more reliable autonomous vehicles. On top of this, simulation can help reduce costs related to regulatory compliance by reducing the complexity of obtaining approvals and certifications. Finally, by identifying design flaws and potential issues early in the development process, simulation reduces the risk of costly recalls and post-deployment modifications.
Safety First
Did you know: In August this year, the California Public Utilities Commission granted permission for Google’s Waymo and GM’s Cruise to start charging customers for autonomous taxi rides within the city. However, a week later, Cruise vehicles were engaged in two significant crashes within a short time frame. The following day, the California Department of Motor Vehicles mandated that Cruise reduce its fleet of driverless taxis by half pending an investigation into the crashes. In the latest events, according to Reuters, GM’s robotaxi unit Cruise is planning to re-launch in one city before expanding to others. As the company said, “Our plan is to re-launch in one city and prove our performance there, before expanding.”
Solution: Simulations can provide valuable insights into the safety of autonomous vehicles.
Safety remains a top priority in the realm of autonomous vehicles. By simulating real-world scenarios that are too risky for on-road testing, developers can assess their vehicles in controlled environments without endangering human lives. For instance, scenarios like a pedestrian unexpectedly entering the road or a vehicle abruptly swerving in front of the autonomous vehicle can be simulated.
This approach enables the identification of potential issues and the prevention of car accidents. What’s more, simulations offer insights into the safety performance of autonomous vehicles under extreme weather conditions and evaluate how these vehicles can handle these conditions. This method empowers researchers and developers to identify potential hazards, assess the effectiveness of safety measures, and fine-tune algorithms to ensure the secure operation of the vehicles.
Increasing performance and reliability
Did you know: According to Intel, every hour of driving, autonomous cars will accumulate around 4 terabytes of data, reaching a petabyte (1 PB) in less than seven days. This data is mainly utilized for making crucial driving decisions within milliseconds.
Solution: Simulation technology allows engineers to collect and analyze vast amounts of data on the performance of autonomous vehicles to improve the accuracy and efficiency of the vehicle’s sensors and algorithms.
Engineers require a variety of sensors, such as cameras, lidar, radar, thermal cameras, and more, to gain a comprehensive understanding of the surrounding environment. Consider a situation where one or more sensors malfunction. Simulating the testing of autonomous vehicles can replicate scenarios with faulty sensors, allowing engineers to assess how the vehicle responds to, for example, the failure of a front-facing camera. This helps engineers determine the functional safety of the autonomous vehicle. This becomes crucial, especially considering the potential safety risks related to human errors in operating autonomous vehicles.
Compliance with industry standards and regulations
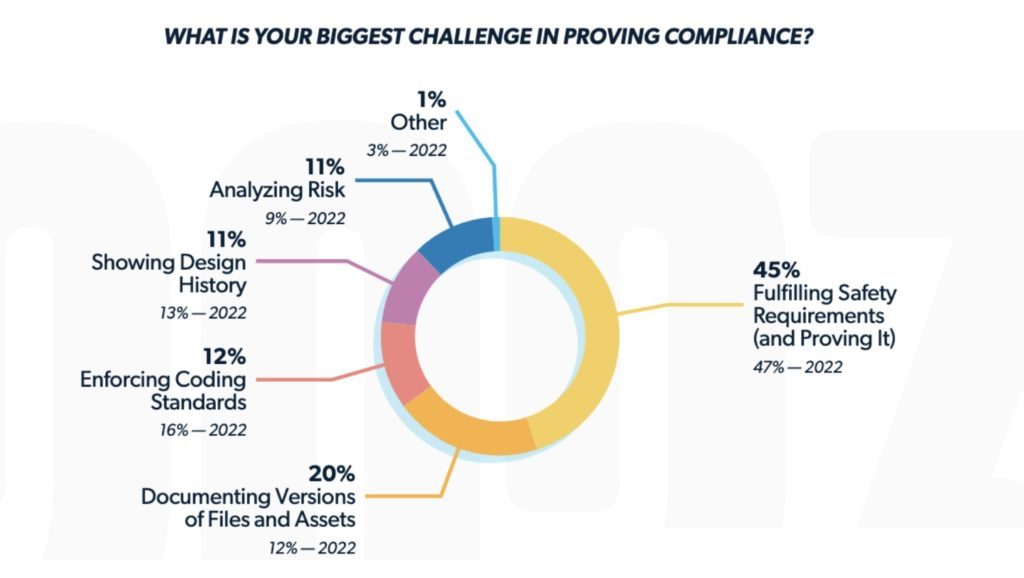
Did you know: According to 2023 State of Automotive Software Development Report, 45% of surveyed respondents highlight that the primary challenge in automotive software compliance is meeting safety requirements and producing documentation to verify their fulfillment. Moreover, a significant number of respondents, more than in 2022, find it challenging to document both automated and manual testing efforts for compliance, reflecting a notable 229% increase from the previous year. This rise suggests that organizations may now face a greater number of compliance requirements, each demanding thorough documentation.
Solution: Early testing can lead to certification more quickly.
The safety-critical nature of developing autonomous driving software requires compliance with various coding standards. Testing is a crucial component of best practices in this context. Before entering mass production, autonomous car software must undergo approval and certification. Therefore, conducting early and frequent testing can speed up the certification process. Moreover, during certifications some use-cases may be verified only in simulation.
Changing the game for AI-powered automotive software
Did you know: At JDPower Revolution Conference, Apple cofounder, Steve Wozniak said that in order for autonomous vehicles to function properly “You’re going to need at least the dumbest human behind the wheel to take control when an unusual situation comes up.”
Solution: AI-powered edge cases can be enhanced with simulation.
One way to solve the above-mentioned scenario is to enhance the training and learning of the AI models that power the AV software through simulation. After processing the data, AI engineers can use the insights gained to adjust algorithm parameters and then retrain the algorithms. The newly labeled data is then incorporated into the training set. Engineers iterate through this process until they achieve the desired accuracy and performance of the model.
AI-powered edge cases enhanced with simulation can create numerous real-life scenarios that humans cannot even think of. Simulation offers a large volume of data and feedback to enhance the accuracy, robustness, and adaptability of AI models, exposing them to challenging situations that may not commonly occur in real-world driving. Modern simulation platforms leverage AI to generate highly realistic environments, actors, and sensors that can operate in the cloud. This training process is critical for ensuring the safety of the vehicle.
Within the simulation, engineers can virtually generate the software and train the neural network to make well-informed decisions. This approach proves to be cost-effective, overcoming testing challenges, and creating quicker results compared to real-world testing.
Accelerate your journey toward autonomy with simulation technology
Long are the days when simulation technology was considered as the critical innovation enabler when it comes to video game technology. Now, simulation plays a key role in training the ground of autonomous vehicles to achieve their transformational potential. However, there are many uncertainties coming from sensor data that automakers still need to overcome to reach this goal.
Explore how we can help you unlock the transformative power of autonomous vehicles by creating simulation environments here or connecting with Bojan Škipina. Stay tuned for the upcoming blog that will delve deeper into the future trends that will innovate simulation in autonomous vehicle software development.
To learn more about how we can help you shape the future of mobility, check out our recent blogs:
Five Automotive Connectivity Trends Fueling the Future
V2X — Paving the superhighway for tomorrow’s smart mobility